进入2025,辅助驾驶尤其是高阶辅助驾驶量产的进程明显加快。
主机厂方面,头部巨头都在推出自家成系列的辅助驾驶解决方案。比亚迪推出天神之眼、吉利推出千里浩瀚,奇瑞推出猎鹰智驾......
这种来自行业头部的推动,直接给高阶辅助驾驶的普及按下加速键。
说一个暴论:在国内,国产厂商们已经基本放弃L2入门,用不了多久,L2高速NOA即将成为辅助驾驶标配。
所以,想要真正让自家产品比别家更有竞争力,在辅助驾驶层面,如果能比友商率先落地高速NOA/城市NOA,将为产品抢占市场先机。
瞌睡送枕头。
2025上海车展上,高阶辅助驾驶方案商轻舟智航就带来了行业首个基于单征程6M的端到端城市NOA解决方案。
01首个单征程6M端到端城市NOA方案
轻舟辅助驾驶方案分为在线系统和离线系统两大块。
在线系统中,轻舟采用一段式端到端架构+安全对齐。
在一段式端到端架构里,轻舟将独创且已得到充分量产验证的「时空联合规划」的经验融入One Model 端到端模型设计中。
所谓「时空联合规划」,指的是在时间维度和空间维度上对运动轨迹进行联合优化,生成同时满足路径可行性、速度合理性、安全约束和舒适性要求的动态轨迹。
比如,轻舟在在线模型训练层面,加入了多层碰撞的损失约束,来保证安全性;添加高阶控制量一致性约束,来保证舒适性。
除此之外,轻舟还有自己的「安全对齐」。就是把安全规则融入到模型训练。
比如在轨迹生成过程中,借鉴图文生成中条件生成的方法,将安全规则作为「教师」,在模型轨迹生成过程中引入额外的指导信号,以增加对生成过程的控制,引导轨迹朝特定方向发展,满足安全性。
此外将安全规则作为奖励函数,对模型进行微调,进一步增加模型的安全性。
综上,确保整个端到端模型既可以充分发挥灵活、上限高的优势,又可以做到下限高、更安全。
离线系统中,轻舟智航构建了基于世界模型的运动模拟,可以批量生产大量的长尾场景和罕见的安全临界场景,用于对端到端模型的模拟验证,以确保系统稳定性和安全性。
轻舟已经实现从数据回传、数据挖掘、三维重建、自动化标注、数据生成到模型训练的完整数据闭环,可以实现天级别的闭环和迭代,以高效的数据驱动持续解决各类复杂的长尾问题。
目前,轻舟用户累计行驶里程达24亿公里;辅助驾驶总里程超3亿公里;NOA总里程超1.8亿公里。
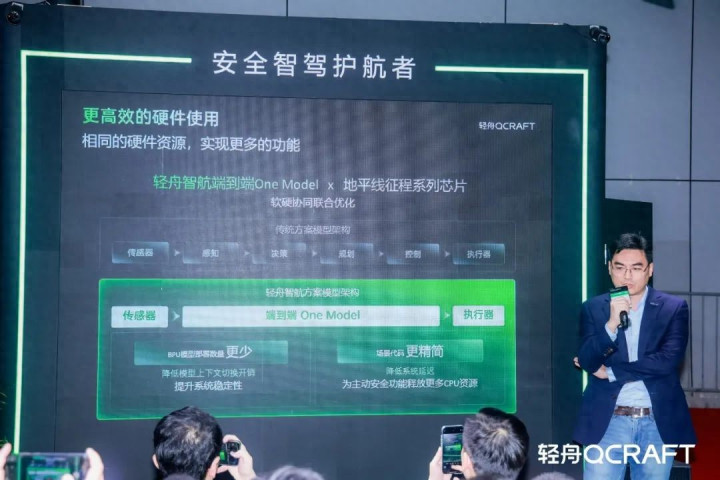
值得一说的是,轻舟结合端到端One-Model的独特设计和对征程系列芯片的深入理解,显著地减少了BPU上部署的模型数量。
同时,得益于端到端模型的使用,轻舟的解决方案大量精简了场景代码,减少了很多不必要的规则使用,降低了系统延迟,释放了大量BPU资源给到主动安全功能。
这也是为什么轻舟能在单J6M上做到城市NOA的原因。
为了保证辅助驾驶的运行安全,轻舟智航在系统设计中,充分考虑各个单点甚至子系统失效的可能性,构建了完善的冗余设计,可有效应对各类安全失效问题。
在硬件层面,域控的诊断模块会监控域控内外的各类故障,监控到故障后功能状态机会采取降级措施,并通知用户接管。若用户长时间未接管,系统还会自动引导车辆安全停车,并上传整个过程数据至云平台分析。
在模型冗余层面,已经量产采用 BEV+Mono 两套视觉架构模型,可在其中一套失效时继续工作,确保感知结果不受影响。
硬件配置上,这套方案采用1L11V5R12U+一颗征程6(算力128TOPS)芯片打造。
车展期间,我们也体验了轻舟的端到端城市NOA方案。
02表现到底怎么样?
我们这次的体验路线比较简单,就是绕着国展周边绕一圈,从洲际出发返回洲际。
直接上结论:轻舟的方案整体风格稳重不偏激,除了刚出发被不文明别车,被迫安全接管,全程再无接管。
说几个让我印象深刻的点:
1、红绿灯启停/前方有车启停,都能做到很快识别响应,快速起步。
2、刹停做的很舒适,基本无顿挫和刹车点头,有人类老司机的味道了。
3、路径规划能力优秀,即便前面无车道线,也能稳稳找到路线,而且中途不会出现画龙或者摇摆,给人的信心感很足。
4、变道果断,无保护左转处理丝滑。
5、遇到需要多车道场景会逐个变道,很规矩。
6、看到异形障碍物(比如锥桶等),会提前进行避让绕行。
除此之外,其中有一个场景让我印象非常深刻。
在完成右转后不久,就碰到有车停在我们车道内(俗称死车)。但是我们的车并没有呆呆的停在该车后面等候,在靠近该车前就不断寻求变道换道机会,整个处理过程很惊艳。
这还没完,绕过这批车不久后,我们很快又碰到相似场景,而轻舟的系统很早就看到并开始绕行,整个过程真的很丝滑。
由此可以看到,轻舟的方案有这么几点长处:
环境理解:场景意图推理能力很强,能结合车道属性、交通规则预判最优策略。
决策规划:博弈能力强,在安全边界内可以做到效率与舒适的平衡。
执行控制:做到时空全程平滑,通过运动学约束与统一规划实现丝滑体验,没有卡点顿挫,很类人。
系统鲁棒性:安全对齐机制隐性守护,确保灵活决策不突破安全底线。
这种能力的背后,正是 「端到端模型灵活性」 与 「时空规划规则性」 的深度融合 —— 用数据驱动解决复杂场景决策,用工程约束保障安全底线,最终实现 「类人而优于人」的驾驶体验。
当然,目前还有可以进一步提升的地方,比如在拥堵缓行场景下跟车会有顿挫,此外还碰到一次较重的急刹,不知道是不是对环境感知的偶发还是优化问题。
03城市NOA,轻舟先行
2023年10月,轻舟拿到头部新势力车企的高阶辅助驾驶项目。
现在,轻舟高阶辅助驾驶量产交付上车突破60万套。
这也为轻舟积累大量的高阶辅助驾驶的量产经验,更夯实了其从技术研发到规模落地的全链路工程化能力。
凭借深厚的技术底蕴和强大的工程化实力,轻舟已成为一家合格的车企技术供应商。
这次,轻舟用一块征程6就飞速做成一套可用的端到端城市NOA,技术实力确实不容小觑,而且这套方案确实很有竞争力。
它能让很多原本定位于高速NOA的车型,能够「越级」配备城市NOA,而且能减少产品开发周期,提升车企产品竞争力。
目前,轻舟智航基于单征程6M的端到端城市NOA方案已经获得车企定点,将于今年规模化量产上车。
根据轻舟智航CEO于骞的说法,今年轻舟辅助驾驶上车大概率要超过50万,「我们可能是第一家成为量产100万辆NOA的辅助驾驶公司。」
完。